パリのお店でぬいぐるみを買う分身ロボット
[図49] それを今度はロボットに応用しようということです。
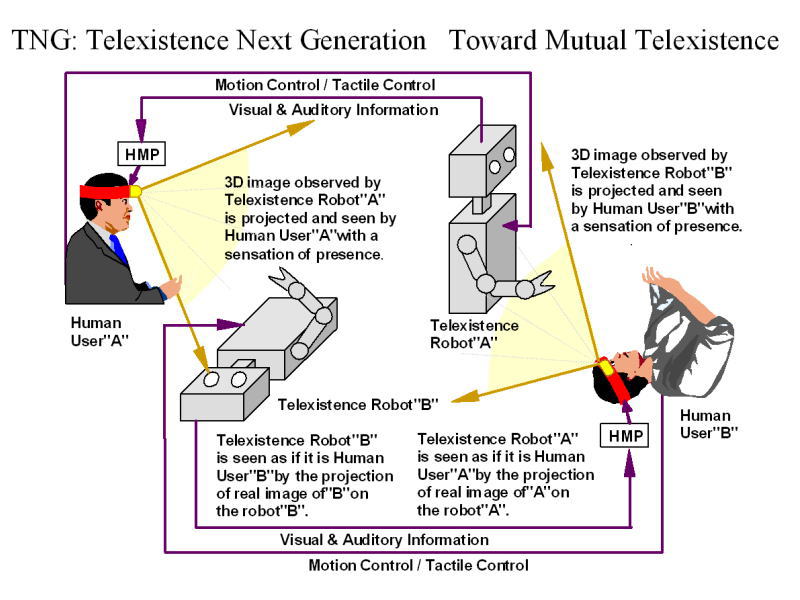
[図50] ロボットに再帰性反射材をつけまして、そこに映像を投影してやる。皆様方がヘッド・マウンティド・プロジェクターをかけて私を見ると私が見える。
そういうシステムを作りたい。それをやるにはさきほどのRPT技術を使う。RPT技術はいろんな応用があります。
これは、何もないボックスなのですけれども先ほどのヘッド・マウンティド・プロジェクターを使うと何か物が入っているように見える。
ものが移動しても光は一瞬にして戻りますから映像がゆがむことなく提示できる。何も書いていない本に映像を投影してそれを読む事ができる。
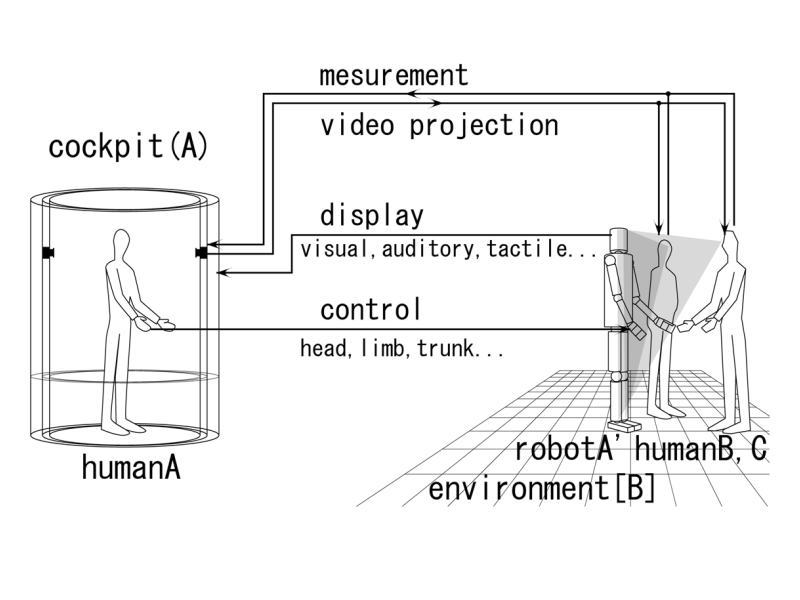
[図51] こういうものを先ほどのTWISTERのコックピットで映像をとって、そしてこちらの人から映像をロボットに投影することでツイスターの中の人の映像を見せてやる。
そういうことが最終目標です。
[図52] 運良く、愛知万博のプロトタイプ事業に採択されまして、2005年、昨年この万博でこのシステムを提示できました。
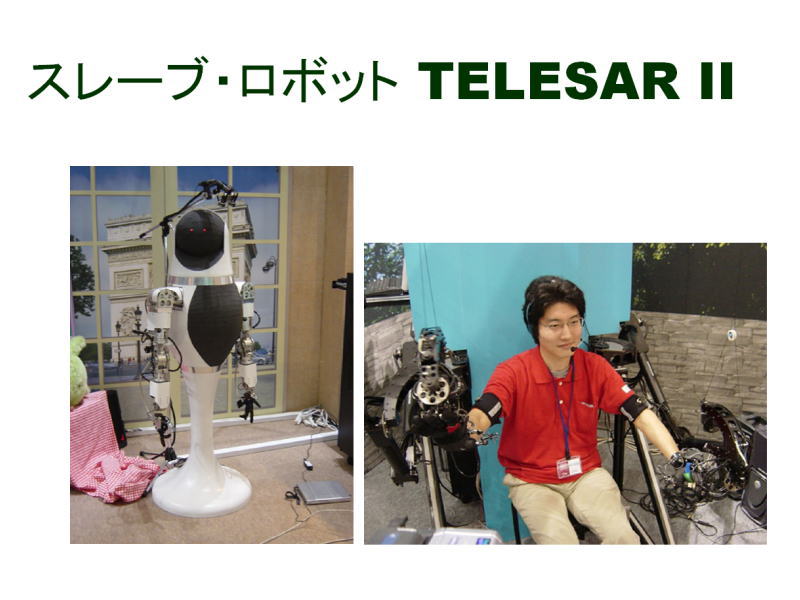
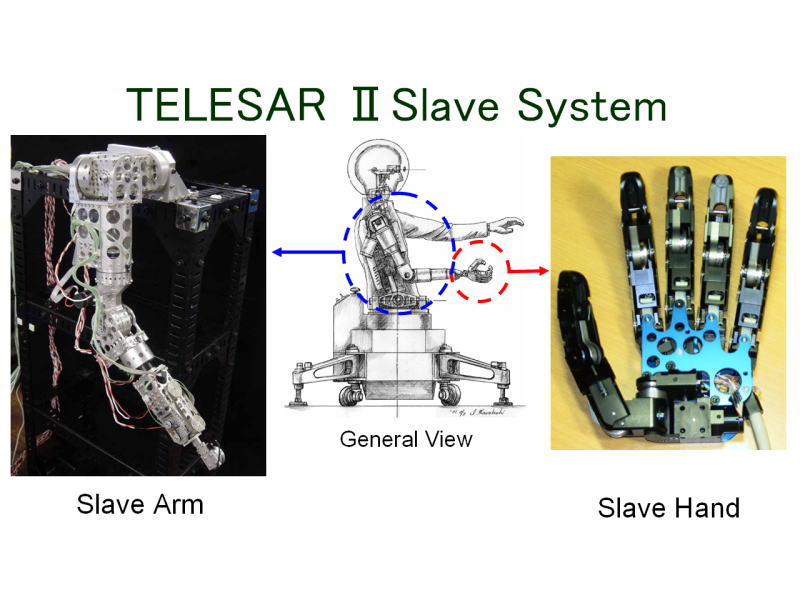
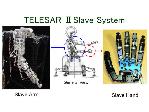
[図53] スレーブロボットとしましては、図53のようなものを使いました。
[図54] 図54のようにハンドがついて手の作業もできます。
[図55] これを使ってインピーダンスコントロールをしました。
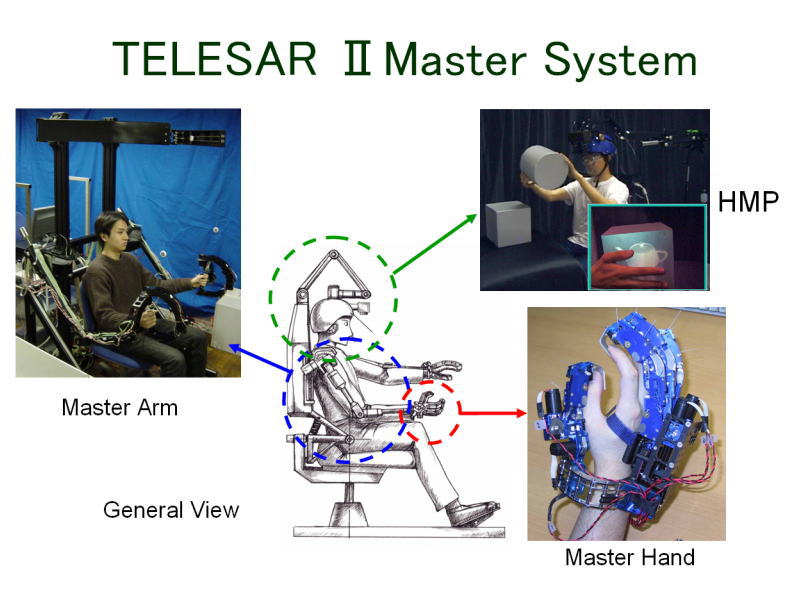
[図56] マスターコックピットも人の顔が見えないといけませんので、立体ディスプレイをならべまして、全部覆われている感覚はありませんけれども、
前だけは3次元で見える。将来はTWISTERを使いたいのです。
[図57] こちらのブースにはロボットを入れます。
パリのお店に行ってぬいぐるみを買うという想定です。
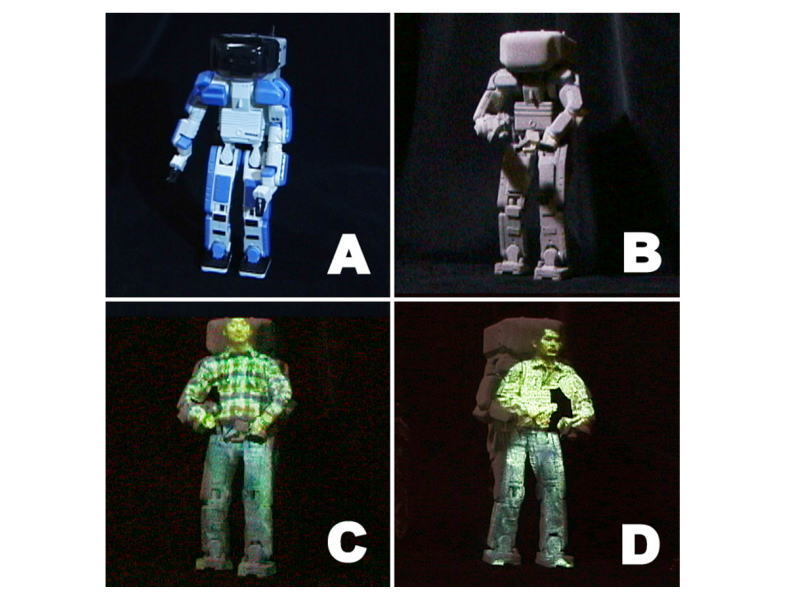
[図58] 実際にはRPTを介して手でさわる。後ろを注意してみると透けて見えると思います。
ただ顔を出すのではなく背景もきちんと透かしてあげると本当にそこに人が来ている感覚になるということです。
[図59] これによって先ほどの相互テレイグジスタンスが一部分できるようになってきている。
(講演で使ったビデオ画像と同じようなビデオ画像をプロジェクトのホームページから見ることができます。)
http://www.star.t.u-tokyo.ac.jp/~damoto/site/research_j.html
[図60] 最初のテレイグシスタンスロボット、それを通常の状況に使えるように研究を進め、遠距離にいる人が会って話しをするようなシステム、
さらに私の姿を見ながら、相互にテレイグジスタンスができるようにRPTシステム、それを実装した例をご紹介しました。
ご清聴ありがとうございました。
|
|
[図49]

[図50]
[図51]

[図52]

[図53]
[図54]

[図55]

[図56]

[図57]

[図58]

[図59]

[図60]
|