|
 |
 |
舘 |
|
|
東京大学教授
舘  |
|
|
| 遠隔操作できる分身ロボット |
|
 |
|
 |
家庭におけるSeeLINDER
[図35] これまでのものはオフィス用と考えています。昔は電話ボックスというのが街角にございました。
今はもう皆携帯電話なのでああいう物はなくなりましたが、街角ごとに電話ボックスがあってそこに行くと電話ができました。
電話はテレイグジスタンスの最初のはしりみたいなもので、離れていてもそこに人がいるという感覚で話しができました。
電話ができた時のベルのいろいろな実験の記録の中に、最初聴いた人が自分の側におばあさんがいると感じたと言ったとあります。
今我々の中でそんなことを感じる人はいませんが、そういう状態になったわけです。
そんな感じでテレイグシスタンスを電話ボックスみたいにしてそこに人が入ってそれぞれの所の人たちと一緒に集うことができるというのが一つの目標なのです。
そうすると、日本の家は狭いので家に置くことはなかなかできない。もうちょっと簡単なものがないかということで、
家庭用テレイグジスタンス電話というものを研究しておりまして,
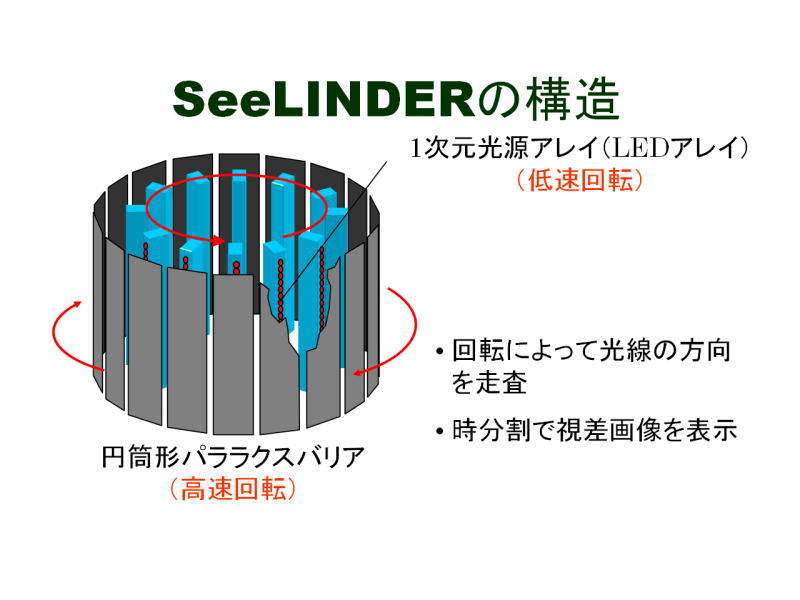
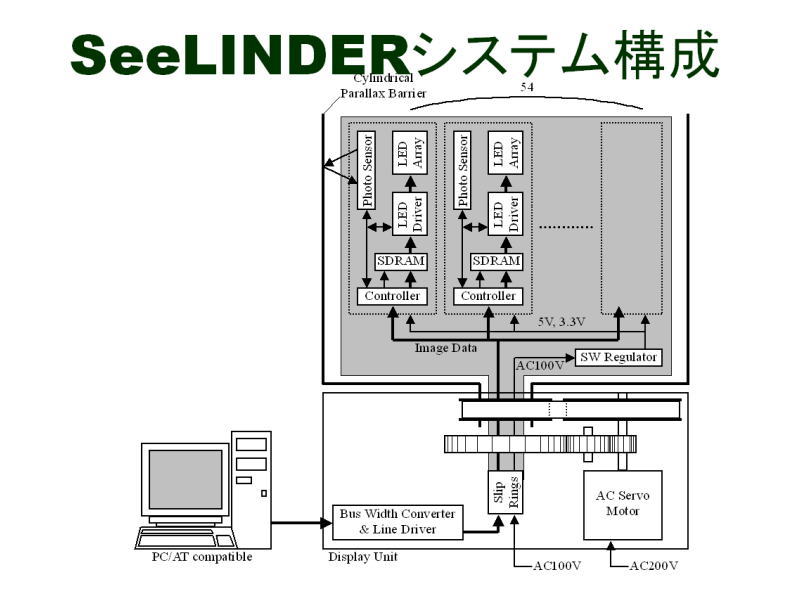
[図36] 図36は先ほどのTWISTERと逆の構造で外側に対して光を出すというものです。
[図37] SeeLINDERと呼んでいますが、どこからみても3次元に見えて、前、後ろ、横から見られるという、これがTWISTERの逆バージョンです。
リアルタイムで実際に動くにはまだまだ時間がかかりますが、将来的には家庭にはこういうものを置いて、
オフィスには先ほどのTWISTERを置いておくことによって互いに通信ができると考えています。
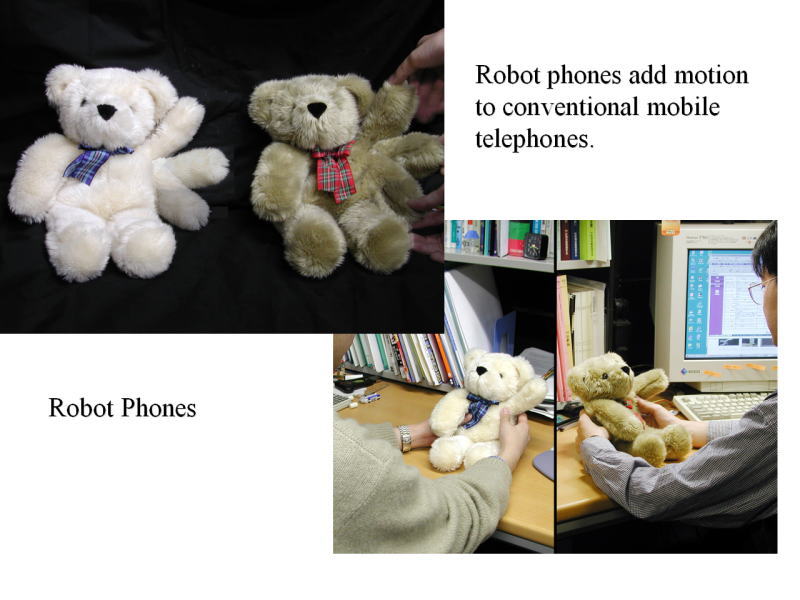
動作を伝えるロボットフォーン
TWISTERは通信ということで、ネットワークを使って互いにテレイグジスタンスを行うブースの研究開発だったのですけれども、
またロボットを使ったテレイグジスタンスに戻って考えてみたいと思います。
[図38] ロボットを使ってテレイグジスタンスするので、人間の形が見えない、動作だけ伝わるということであれば簡単にできるのではないか。
人間の顔は見えません。声だけが聞こえて動作が伝わる。それぞれは、それぞれのアバターです。このように電話と同時に動きも伝えることが出来できます。
これですと、今のインタネットでも十分に使えます。
(ロボットフォーンのビデオ画像)
http://www.star.t.u-tokyo.ac.jp/projects/RobotPHONE/Proto2.mpg
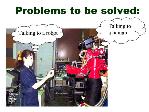
透明人間ができるヘッド・マウンティド・ディスプレイ
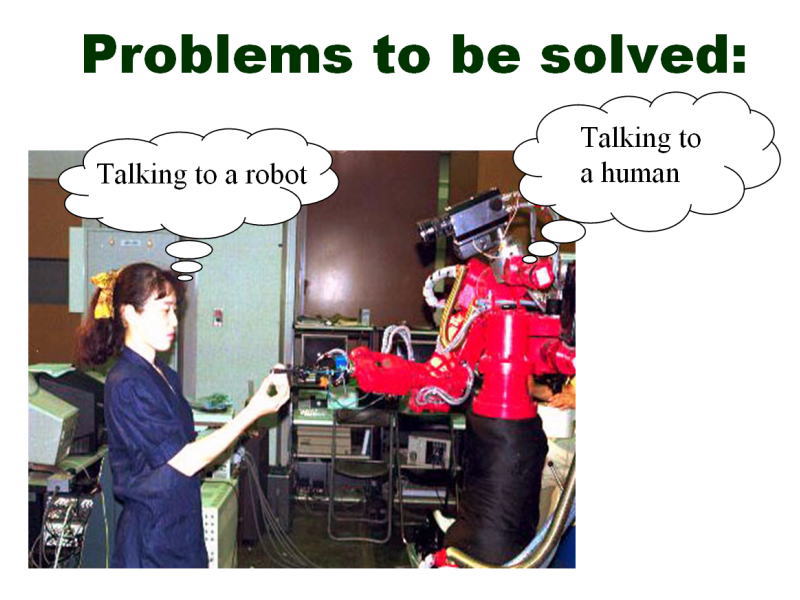
[図39] こういうことをさらに進めて、人間が見える状態を作りたい。たとえば、先ほど、私がここに来る代わりにロボットをおいて、
私は研究室の方から講演をするという話しをしました。その時、私はいいのです。みなさんが見えて、声を出せば声が出て、手を出せば、手を動かせる。
私自身は臨場感を持ってテレイグスタンスをしている。しかし、皆様方から見ると、ここにロボットがいるようにしか見えない。
私自身が見えているわけではなくて、私の声は聞こえるが、姿はロボットで私自身がここに来ているとは思いにくい。
写真を貼ったり映像を出しても、やはり本当らしくない。本人が来ているという存在感をだすにはどうしたらよいか。
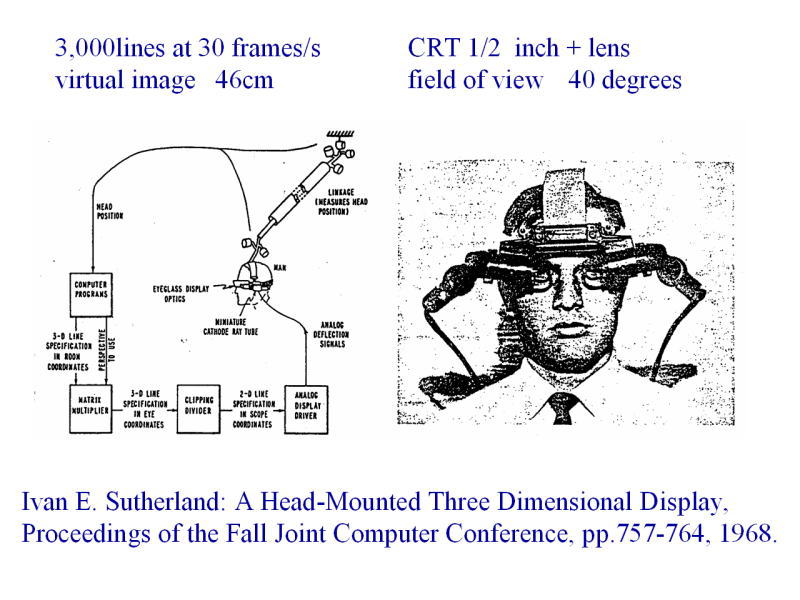
[図40] ヘッド・マウンティド・ディスプレイはアイバン・サザランドが最初に提案したものです。サザランドはスケッチパットを研究しており、
コンピュータグラフィックスの祖でもありますが、バーチャルリアリティの祖とも言われていて、最初にヘッド・マウンティド・ディスプレイを作ったのです。
図40は通常今使われているデバイスです。
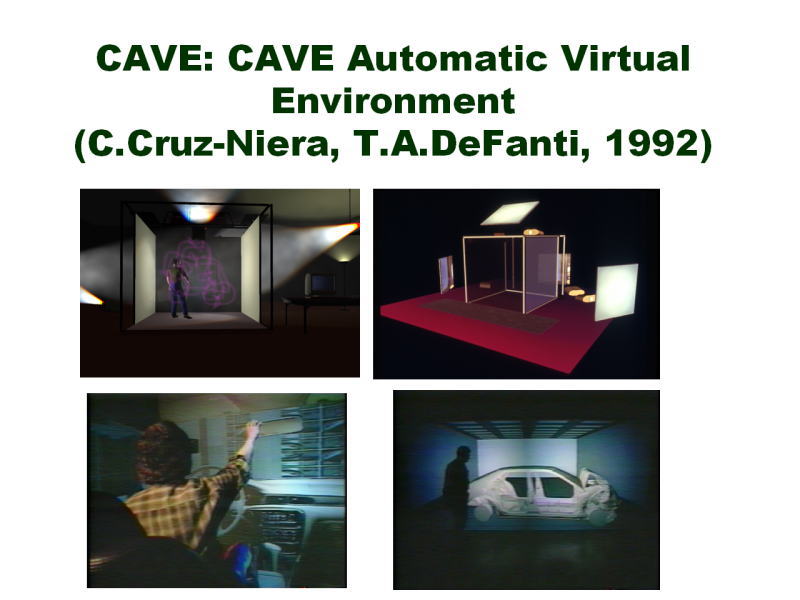
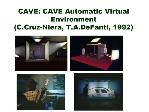
[図41] 先ほど話したCAVEも別のタイプの3次元デバイスです。
これらのものはバーチャルリアリティだけを出すディスプレイとしてはいいのですが、オーグメンティドリアリティ、
実空間の中にバーチャルリアリティを出そうとするには問題点が出てまいります。
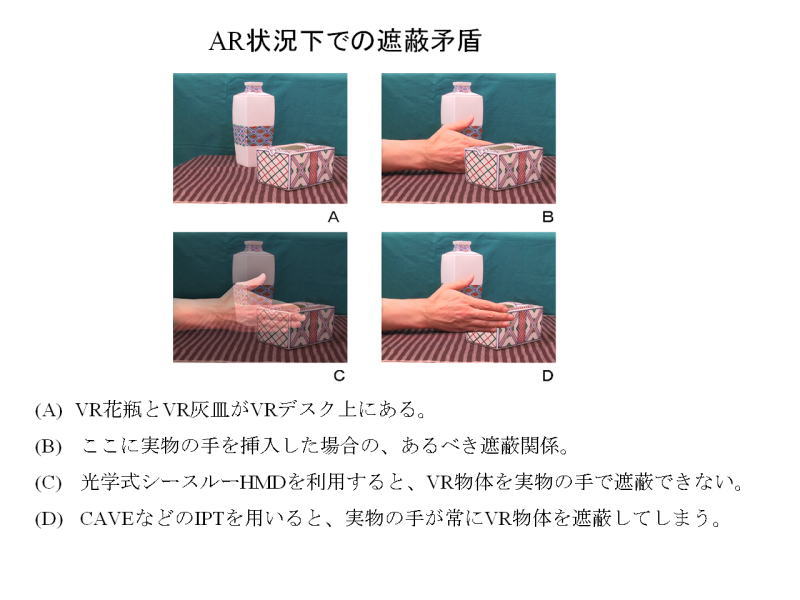
[図42] 図のAはコンピュータを使って、バーチャルリアリティでつくった花瓶と灰皿です。そこに人間の実際の手を入れよう、
バーチャルリアリティに実際の手をいれようとしますと問題があります。ヘッド・マウンティド・ディスプレイでやりますと、
映像はヘッド・マウンティド・ディスプレイにあって、その映像を投影して立体視するようにして遠くにあるように見せています。
もともとは遠くにあるのではなくて目のすぐ前にあるのですから、手で遮っても、絵は消えません。絵も見えて手も見える。
しかし絵は立体視の原理で3メートルなら3メートルのところに像ができています。
手を入れると3メートルのところに像ができているのに手が見えるので、手が透けてみえる感じになってしまう。
CAVEの場合は壁の所に映像を出しているので、手を入れると絵がみえない、灰皿も花瓶も両方とも遮蔽されてしまう。
実際の遮蔽関係はケーブでもヘッド・マウンティド・ディスプレイでも作りにくい。
ヘッド・マウンティド・ディスプレイでもビデオシースルーではできるのですが、視野が狭かったり、手間が掛かったり、距離計測などをしなくてはいけない。
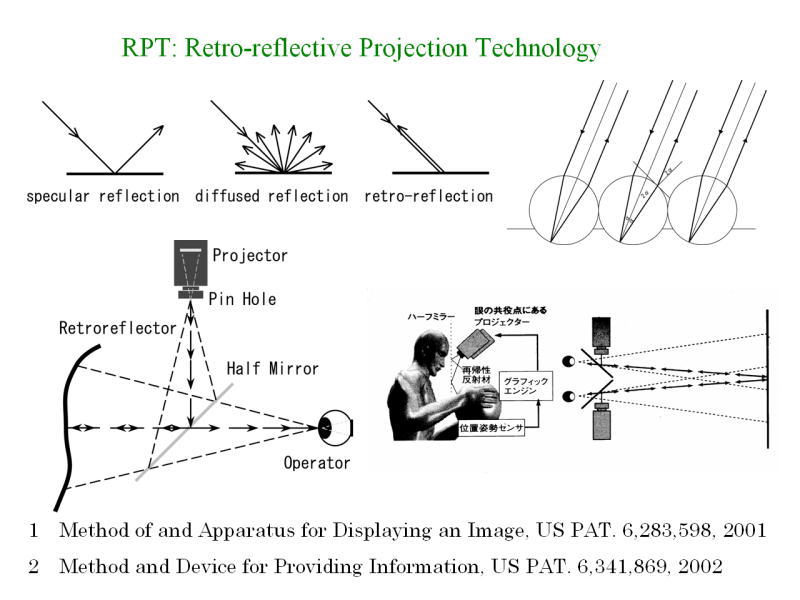
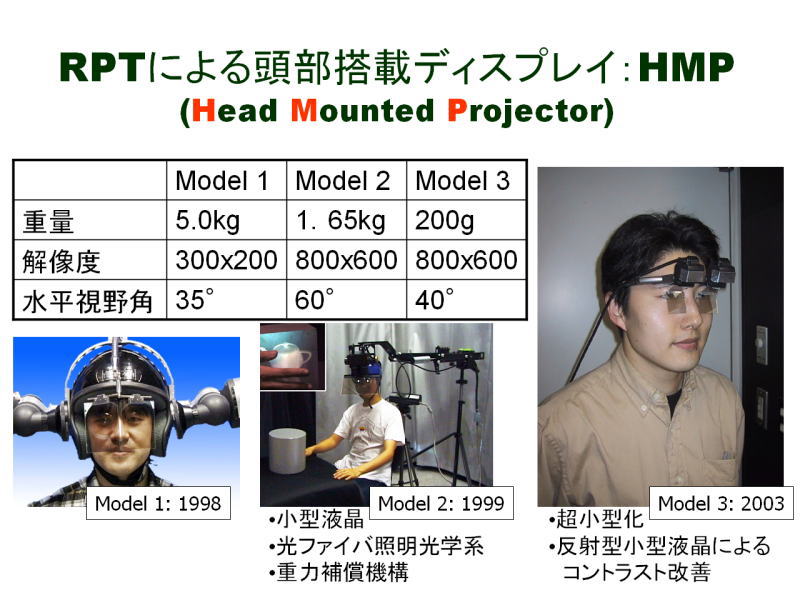
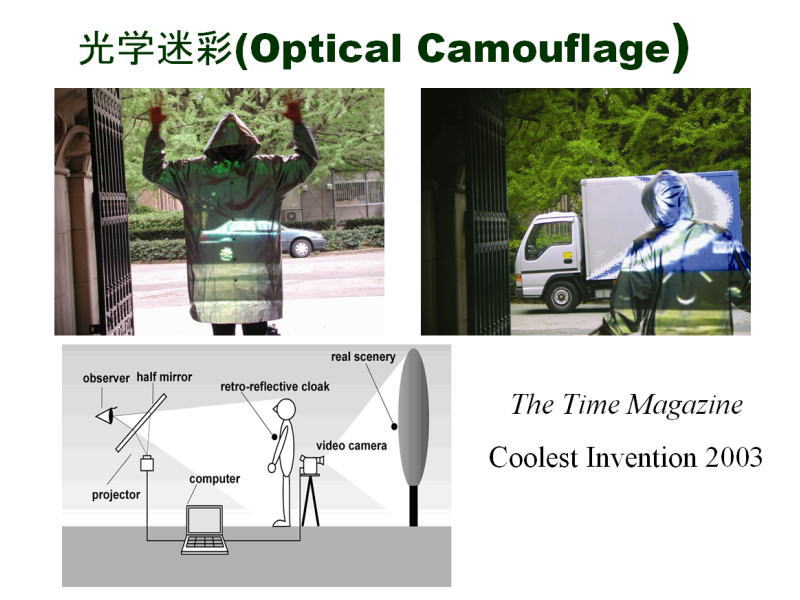
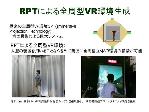
[図43] もっとうまい方法がないかということで、研究開発されているのが、RPT(Retro-reflective Projection Technology)です。
これは再帰性反射を利用します。鏡面反射の場合は、光の原理によって入射角と反射角が等しくなるように反射しますし、
ランバーシャンというすりガラスのような面はいろんな方向に反射する。それに対して再帰性反射は入った方向へ光が反射する。
コーナーキューブなどはいい例です。そうでなくても50ミクロンぐらいの小さなビーズをならべておきまして、屈折率をうまく調節すると、
そこに入ってきた光が屈折してちょうど同じ方向へ出て行きます。それによって再帰性反射ができます。
それをうまく利用すると、新しいディスプレイを作れます。プロジェクターの光を目から出して目に戻したいので、
プロジェクターを人間の目と同じ場所にあるようにするために、ハーフミラーを置いて光が目からでているのと同じような条件を作ります。
そうしますと、プロジェクターの光は再帰性反射によって目にもどります。こういった仕組みをつくりますとプロジェクターの映像がよく見えます。
しかも反射する面は平らな面である必要はありません。一個一個が再帰性反射しますので、どんな面だろうが全部きちんと戻ってくるので、
この条件が満足される。焦点深度を深くすることで結像の条件が守られる。
この良い点は右目と左目用の像を別々のプロジェクターをつけて投影することができて、右目の光は右目に戻り、左は左に戻すことができるので、
両眼立体視が容易にできる。
[図44] これを使ったヘッド・マウンティド・プロジェクターを研究開発しています。
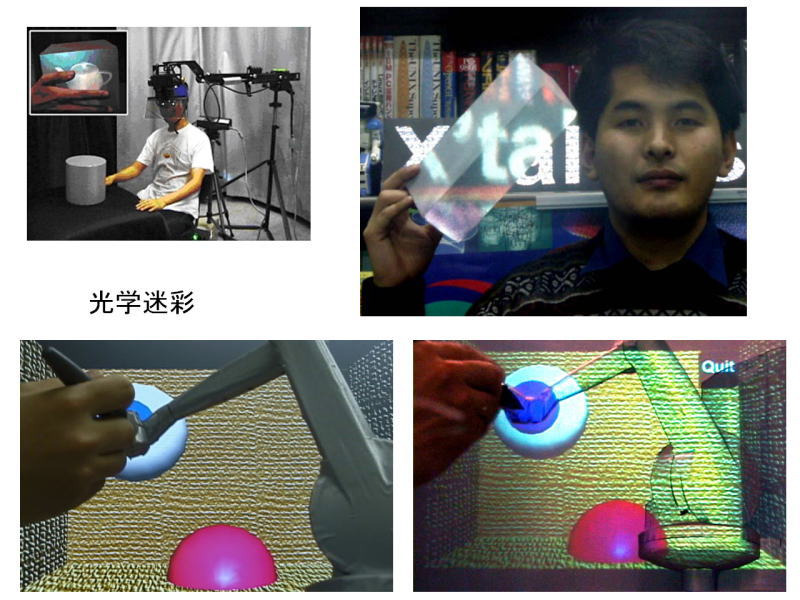
[図46] [図47] [図48] こういうものを使うと何ができるかということなのですけれども、たとえばこういった後ろの映像が見える。
(RPTのビデオは以下のURLのプロジェクト説明から見ることが出来ます。)
http://projects.star.t.u-tokyo.ac.jp/projects/MEDIA/xv/oc-j.html |
|
[図35]

[図36]

[図37]

[図38]
[図39]

[図40]
[図41]

[図42]

[図43]

[図44]
[図46]

[図47]

[図48]
|
|
|
|
|
|