|
 |
 |
舘 |
|
|
東京大学教授
舘  |
|
|
| 遠隔操作できる分身ロボット |
|
 |
|
 |
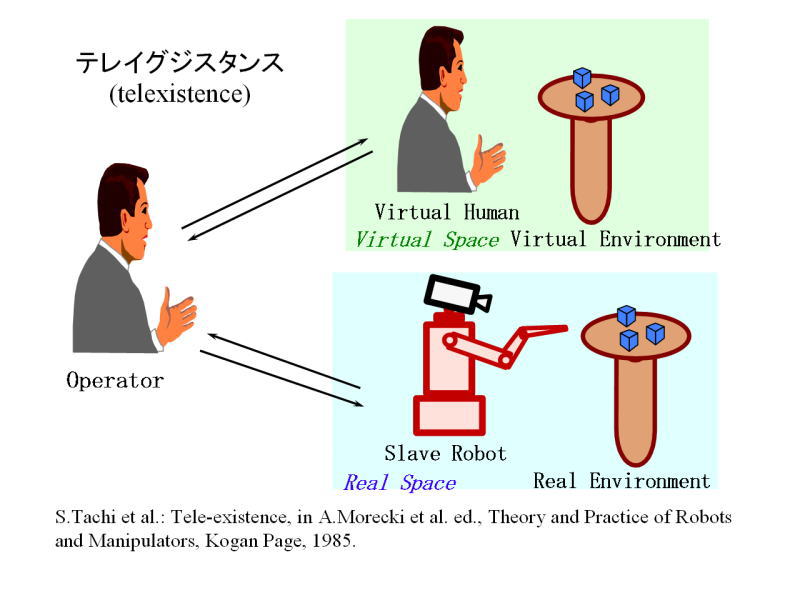
『遠隔に存在する』テレイグジスタンス
もうひとつにはテレイグジスタンスというものもあります。これは今日の主題です。
自分の分身が遠くにいて、しかし自分が遠くにいるということを感じないでそれを使えれば、まさにそこに行った感覚が持てるのではないかということです。
これがテレイグジスタンスで分身ロボットのひとつです。 [図14] 「テレ」は「遠隔」、「イグジスタンス」は「存在する」という意味で
『遠隔に存在する』ということです。例えば私がここに来る代わりに、ここにロボットを置き、私は工学部の一号館の研究室にいて、
これを操縦しますと、このように見回して皆様が見え、私が手を動かせば、ロボットも動いて講演をしてくれるといった感じです。
そしてそのロボットを自分の意のままに使い、ロボットの感覚器を使って自分がそこに存在するような感覚を持っていろいろな行動をすることができる、
というのがテレイグジスタンスです。テレイグジスタンスはもちろんそのロボットの中に入った感覚も作れますし、
また、コンピュータの作り出した空間の中に自分のバーチャルヒューマンをおいてその中に入り込んで動かすこともできます。
これらの二つを区別することはないわけで、人間側は同じ装置を使って、ロボットと結べば実世界のいろいろな遠隔の地、あるいはどこか違う所に行けます。
また非常に小さなスペースの中に入り込んだりすることができます。コンピュータにつなげるとコンピュータの作り出した空間の中に入り込めます。
つまり狭い意味でのバーチャルリアリティだということです。
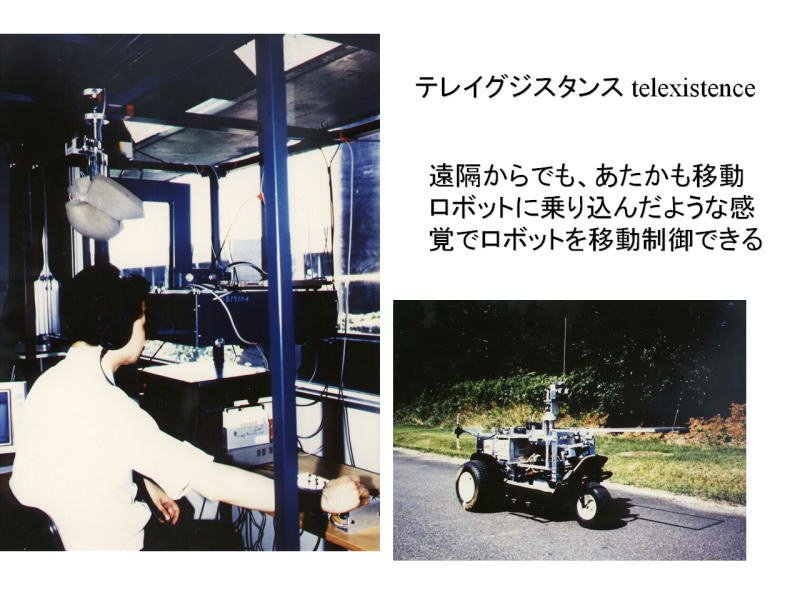
[図15] 20年近く前に図15のような移動ロボットを動かしました。移動ロボットを動かすのでもリモコンを使って動かすような感覚ではありません。
リモコンの飛行機を飛ばしているときは、自分は地上にいてリモコンの飛行機を見ながら操縦するわけです。
そうではなくて、自分が乗り込んだつもりでそのビークルを操縦している、自分が運転しているという感覚で動かすという研究が始まったわけです。
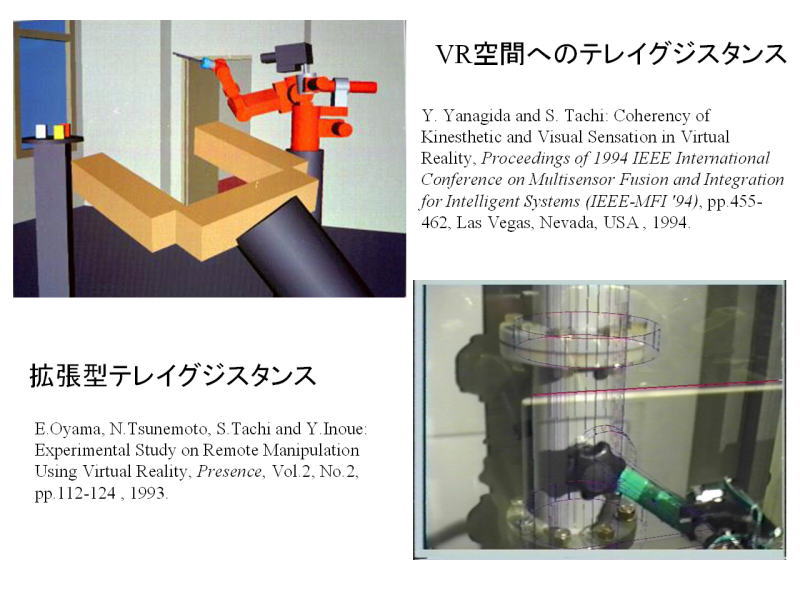
[図16] その後図16のような人間型のロボットを構成し自分がその中に入り込んだような感覚でそれらを制御しようというものも始まりました。
[図17] さらに図17のようなバーチャルリアリティ空間を作りまして、そのバーチャルリアリティ空間の中に入り込むということもできます。
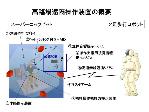
バーチャルリアリティ空間をどうやって応用するのかを説明します。これはオーグメンティドリアリティといっているものなのですが、
例えば、暗闇の中だと人は見ることができないのですが、ロボットの方のセンサーに赤外線センサーとか超音波をうまく利用して、
あるいはもともと持っている知識で空間を記述しておきますと、それを利用して暗闇の中でも物を見ているような感覚を作り出すことができます。
そういうものをスーパーインポーズする、あるいは置き換えるというようなことによりまして、暗闇の中でも明るい所のように作業ができます。
しかも実際にその空間の中ではロボットが動いている、そういうようなバーチャルリアリティ空間を介した遠隔制御といったこともできるわけです。
こういうのを拡張型のテレイグジスタンスと呼んでいるわけです。どんなものかということをまず見て頂きます。
(ビデオ画像)
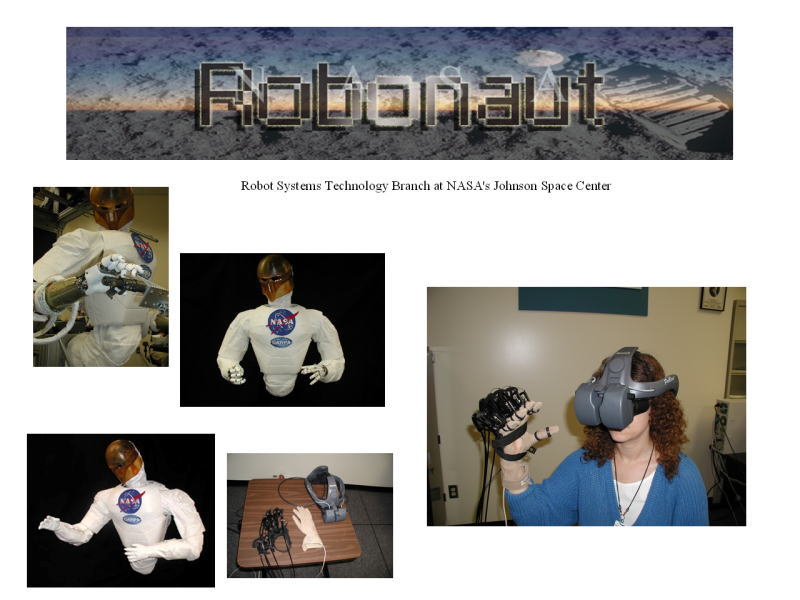
[図18] こういう研究は図18に示したようにNASAでも行われておりまして、
ロボノードというプロジェクトにおいてもテレイグジスタンスの研究が行われています。宇宙船の船外活動などを行うという試みです。
[図19] ということで、1992、3年頃には、日本ではロボットを使って操縦をするという所までいっていたのですが、
人間とロボットを専用回線で結ばなければならなかったので、誰でもが自由に使うということはできませんでした。
それを誰でも自由に使えるようにならないか、ネットワーク技術が進んで来ているので、
それをうまく利用してテレイグジスタンスが自由自在にできないかということで、図19に示すアールキューブ構想というものが生まれ、
アールキューブ構想委員会ができて、いろいろな提案がされました。
アールキューブという本にはSFもどきのアールキューブストーリーが書かれてありまして、こういうものが使われると社会がどのように変わるか、
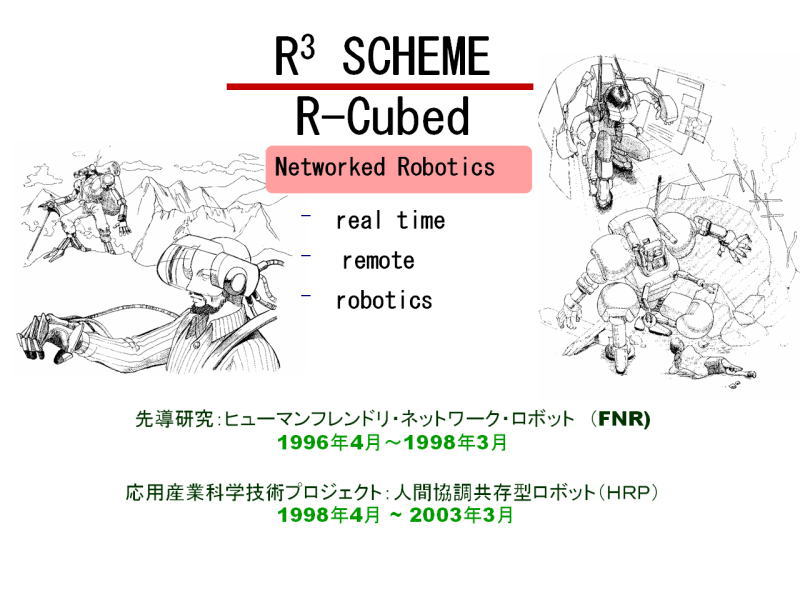
ということが描かれていました。[図20] アールキューブ構想に基づいて図20に示すようないろいろなプロジェクトが生まれました。
先導研究としましては、ヒューマン・フレンドリー・ネットワーク・ロボットという研究が行われて、それに基づいて応用産業科学技術プロジェクトとして、
いわゆるヒュ-マノイドロボットというのですが、「人間協調・共存型ロボット(HRP)」のプロジェクトが進められたわけです。
そのころ、同じ時期にホンダさんが、ヒューマノイドロボットを実際に作り出されて二足歩行に成功しました。
それを実際にテレイグジスタンスで動かそうとしました。
それと同時に誰でもどこでもヒューマノイドロボットを作れるように技術を高めていこうということで、プロジェクトが進められたわけです。
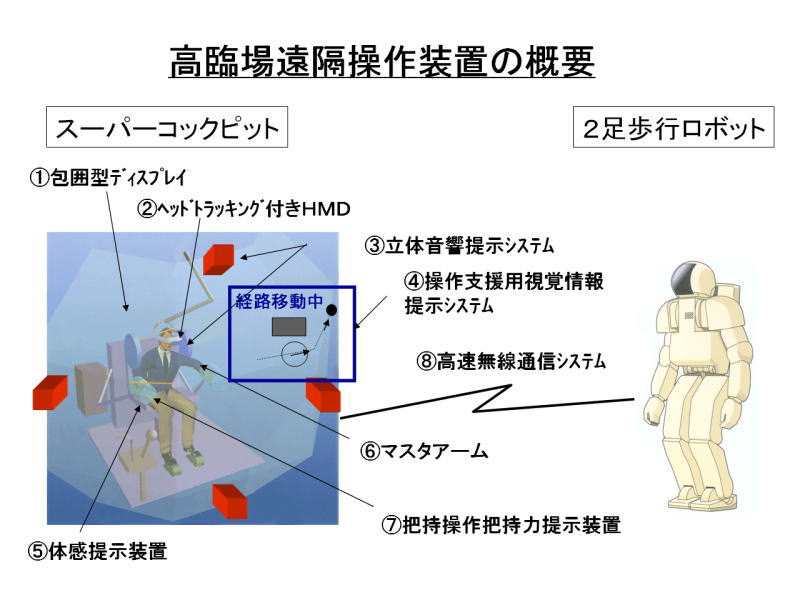
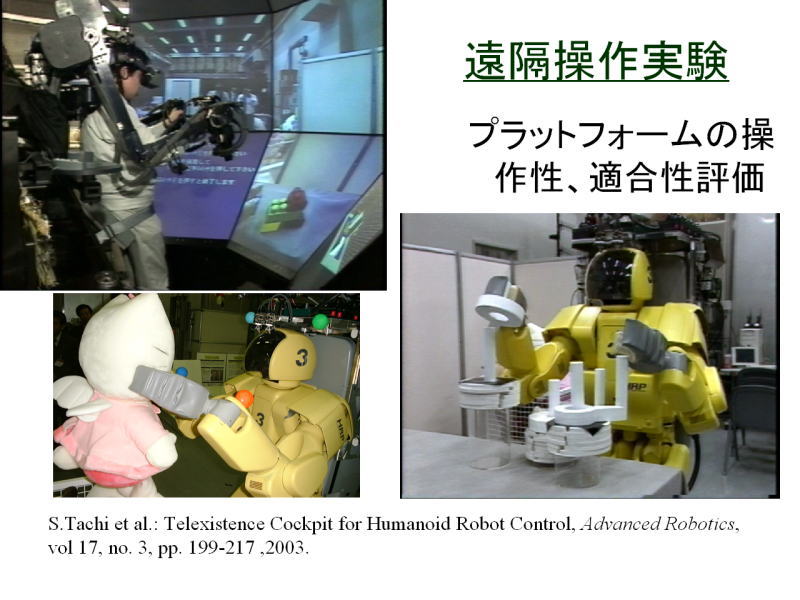
[図21] 私達は図21のようなスーパーコクピットを作り出して、
ホンダの二足歩行ロボットの中にテレイグジスタンスを実現することを目指して研究を行いました。
[図22] 移動しているときに広いスペースが一望に見渡せるように図22のような大きな包囲型ディスプレイを用意しました。
実際に作業するときにはヘッド・マウンティド・ディスプレイを使って作業をします。
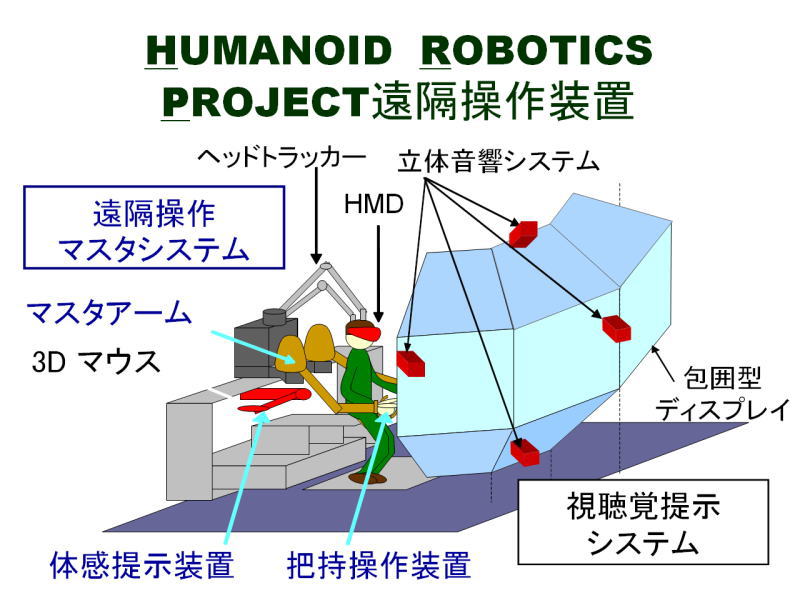
[図23] 図23がそのときの図ですが、これはホンダのロボットを改良して遠隔制御できるような形に直しました。
それをこちらにあるコクピットから操縦しますと、自分がその中に入り込んだような格好で作業ができます。
つまりそのロボットを着込んでいるという形で作業ができるというわけです。これもちょっとビデオを見て頂きたいと思います。2000年ぐらいのころのものです。
(ビデオ画像)
[図24] HRPロボットはいろいろな応用のために使われています。今日はその話しはしませんが、
[図25] 図25に示すように、ビルホームサービスや車両代行運転、原子力施設の保守点検、対人サービス、屋内共同作業といったところで使われると同時に、
HRP2というロボットの開発にも成功したわけです。
|
|
[図14]

[図15]
[図16]

[図17]

[図18]
[図19]
[図20]
[図21]

[図22]

[図23]
[図24]

[図25]
|
|
|
|
|
|