|
 |
 |
舘 |
|
|
東京大学教授
舘  |
|
|
| 遠隔操作できる分身ロボット |
|
 |
|
 |
分身ロボット
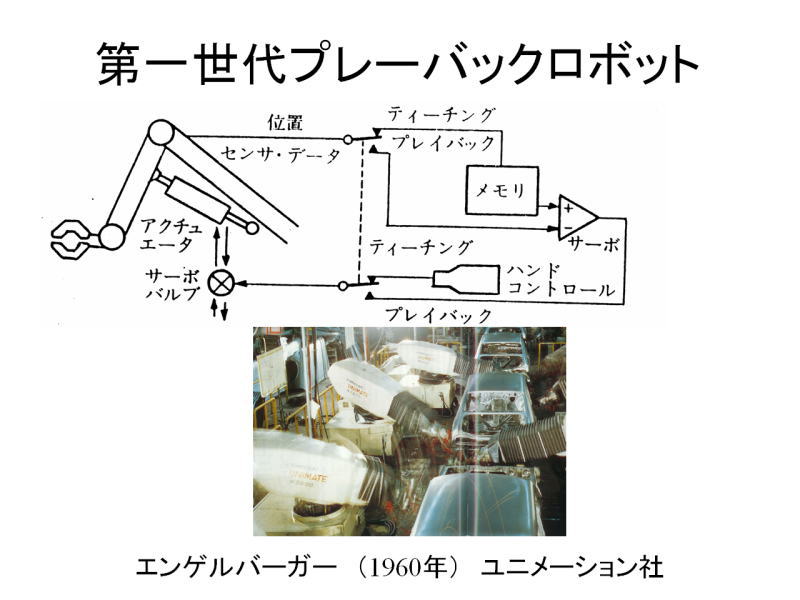
[図8] 今日の話は、バーチャルリアリティの話とロボティックスを結び合わせることであります。ロボットに関しましても長い歴史がありますが、
実際のロボットとして登場したのはそれほど古くはなく1960年です。第一世代のプレイバックロボットというものですが、
エンゲルバーガーという人がユニメートという産業用ロボットを作りましてそれを売り出した、というところから始まるわけです。
その前にもいろいろと夢物語とか、見せものとしてのロボットはありましたが、実際に仕事をするのはこのプレイバックロボットが初めてで、
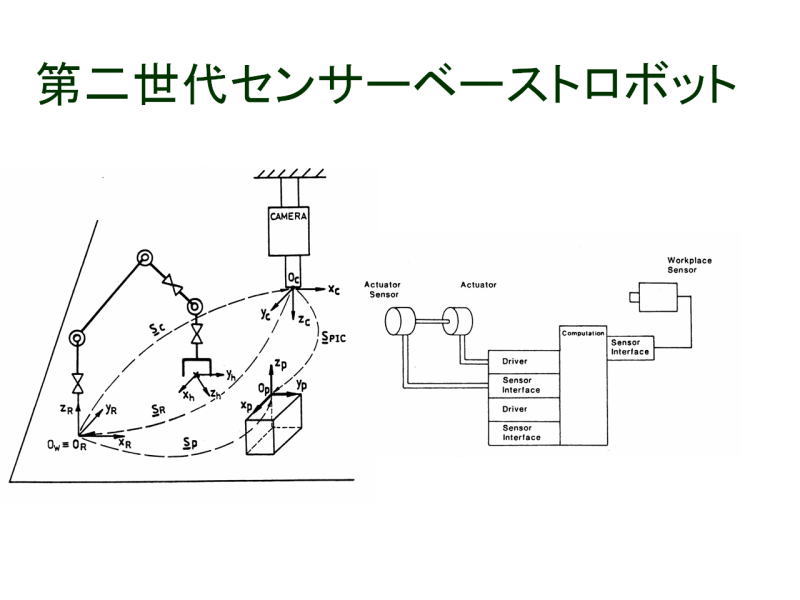
自動車産業などで使われました。 [図9] 70年代、80年代に第二世代と言われております、センサーベーストロボット、
センサーによって行動を変えるロボットというのが登場してきます。第一世代はプレイバックロボットと呼ばれていて、教え込まれるとその通りに再現する。
それに対して状況の変化に応じて直して行くのがセンサーベーストロボットです。
[図10] それらは工場の中で働く事で効果を上げていました。工場の外で使うために第三世代の管理制御型自律移動ロボットというものが、
80年代後半から90年代にかけて研究されました。例えば、当時の通産省のプロジェクトとして行われた極限作業ロボットという危険な環境で働くロボット等、
移動機能がついたものが世界各地で研究されました。一番の成功例は火星に着陸したNASAのMars Roverです。
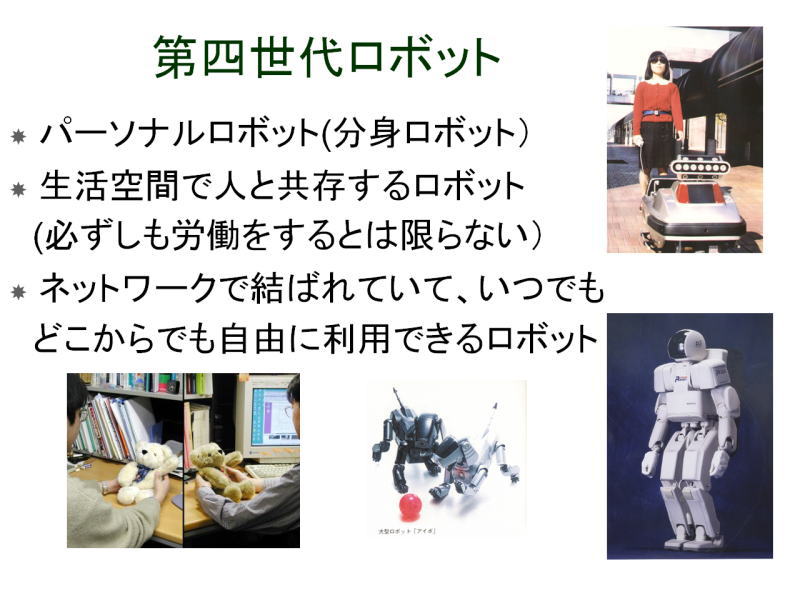
[図11] 1990年の終わりから2000年にかけて研究が一番進展しているのが第四世代ロボットで、人間型ロボットです。
人間の分身として働けるようなロボット、生活空間で人と共存するようなロボット、さらにネットワークでつながれていて、
いつでもどこからでも利用できるロボットが最近の流れとして研究されています。ヒューマノイドロボットは皆さんいろいろな所で見ていると思います。
実用はまだまだ先ですがそういう研究が進んでいるということです。
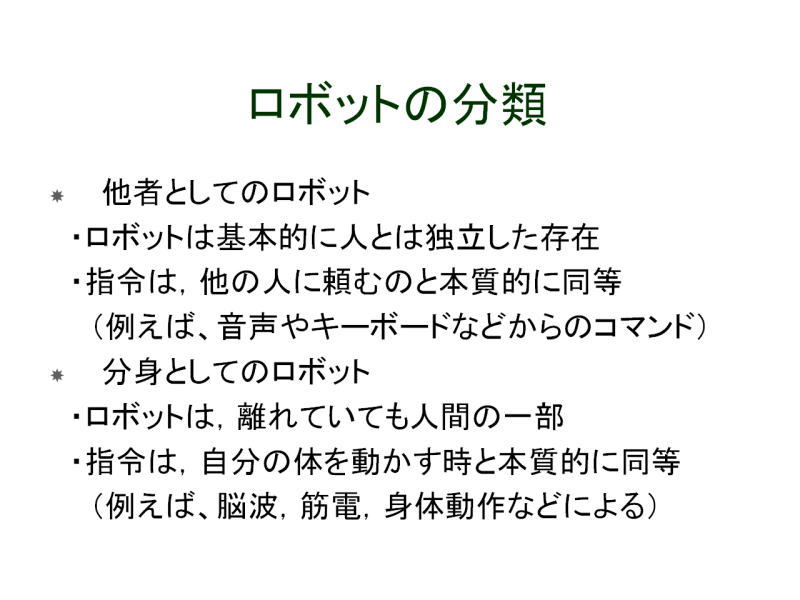
[図12] 人間型ロボット、動物型ロボットという分類がありますが、もっと本質的な分類は何かということを図12に示しました。
ロボットの作り方、設計の考え方には二通りあります。ひとつは他者としてのロボットです。
ロボット自体が基本的には独立して仕事をし、独立して作業し、将来は独立して思考もしようというものです。
人間や動物の再現を目指しているようなものです。
基本的に命令するのには音声や言葉を使い、そういう自然言語を理解しそれを自分で行動の中に生かしながら、
周りの状況を認識してそれに基づいて作業するのが、他者としてのロボットの目標です。
つまり、自律していろいろな行動ができるような独立した存在を作ろうというもの、それが他者としてのロボットです。
もうひとつ、それと考えを異にするアプローチがあります。分身としてのロボットです。
これはロボット自体を他者として作らないで、人間の一部として作る。例えば手を失った人の義手がわかりやすい。
義手はそれをつけている人の意志によって動いてくれます。つまり自分の一部なのです。
あるいは目の不自由の人のための盲導犬ロボットというものがありますが、それはロボットの考えで動くのではなくて、目の代わりをし、
離れてはいますが自分の一部として行動してくれる分身ロボットです。
さきほどの義手の例に戻りますと、自分の手がここになかったとしてももうひとつの手がここにあり、
自分の意志で動いてくれればこれはもう自分の分身なのです。
あるいはロボット自体がそこにあったとしても、それ自体が持っている意志がなく、意思というものがすべて自分の意思であった場合には、
それは自分の分身なのです。これが分身型ロボットだと考えます。そのときの指令系統は音声ではなく、自分の動作や筋電などの生態信号です。
言葉で言わなくても動いてくれなければ自分の分身ではありません。わざわざ自分の手を動かすのに命令をしません。
それと同じように自分の手を動かすのと同じように扱えるロボットが分身ロボットなのです。
[図13] 筋電義手や盲導犬ロボット、あるいは自分のすぐそばにいて、自分の意志で動いてくれるものもあれば、それは分身ロボットです。
|
|
[図8]
[図9]

[図10]
[図11]
[図12]
[図13]
|
|
|
|
|
|